
Structured Light Field
With the restoration of three-dimensional (3D) scenes becoming increasingly important, several 3D measurement devices, such as Microsoft’s Kinect have become commercially available. Potential applications range from human interfaces to video games and medical equipment. In particular, measurement targets requiring high-speed sampling such as human interfaces and robot vision need high-speed low-delay measurement.
The speed of conventional active stereo is, however, limited to 30–100 Hz, because it requires time-consuming stereo matching between two images captured from different points of view or one captured image and a known projected pattern.
To achieve high-speed 3D restoration, our group proposed the Structured Light Field (SLF) that can reduce the amount of calculation. The SLF is a light distribution that changes its lateral intensity pattern in accordance with the distance from the source. By projecting SLF to a scene, the projected image on each object in the scene has a particular pattern depending on the depth of the object. This means that the depth information is projected and superimposed on the surface of the objects, and direct estimation of depth is possible by recognizing the projected intensity pattern. The projected pattern is designed so that the distance could be estimated with simple algorithm and small amount of computation. A conventional PC equipped with one GPU board could estimate 512x512 depth image in 1 ms.
Tracking of a randomly moving target based on high-speed background separation using 1000 Hz depth image feedback, and dynamic projection mapping using laser projector on a moving object closest to the projection system based on also high-speed depth image feedback at 1000 Hz, were demonstrated. The following movie shows the result of 1000 Hz depth image measurement of the burst of a balloon, and dynamic projection mapping on a moving object and a hand.
Movie of 1000 Hz depth image measurement of the burst of a balloon, and dynamic projection mapping on a moving object and a hand.

Fig.1 SLF concept.

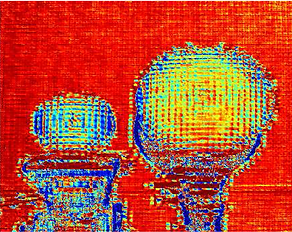
Fig.2 The two spheres projected the SLF (left) and estimated depth map for the scene (right).
References
-
Akihiro Obara, Xu Yang, and Hiromasa Oku : Structured Light Field Generated by Two Projectors for High-Speed Three Dimensional Measurement, Journal of Robotics and Mechatronics, Vol.28 No.4, pp.523-532 (2016) [doi:10.20965/jrm.2016.p0523]